|




1. Introducción
Muchas de las lesiones y fallecimientos ocurridos en accidentes de tráfico son resultado de impactos contra las actuales barreras de seguridad, especialmente en el caso de usuarios vulnerables de las vías, tales como motociclistas y sus pasajeros, así como ciclistas, en los que los impactos contra los postes de sujeción de las citadas barreras, o los bordes de los elementos metálicos que las componen, frecuentemente se traducen en amputaciones producidas por un efecto de guillotina.
Una vez se ha producido un accidente de tráfico, el tiempo transcurrido entre la colisión y la recepción de primeros auxilios puede ser crucial, ya que cualquier retraso en la alerta de los servicios de emergencia, o cualquier información incorrecta facilitada a los servicios de emergencias sobre la ubicación del accidente, pueden traducirse incluso en desplazamientos de los servicios de emergencias a ubicaciones incorrectas, con el consiguiente incremento en el riesgo de perder las vidas de los heridos.
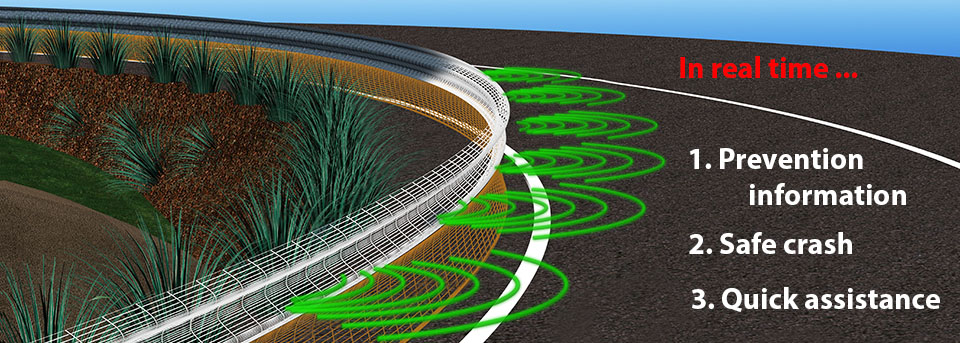
El proyecto Smart RRS ha desarrollado un nuevo concepto de barrera de seguridad inteligente que reduce el número de muertes y lesiones causadas en accidentes de tráfico. El nuevo concepto de barrera mejora su capacidad de protección ante impactos de usuarios vulnerables, a la vez que integra unos sistemas de sensores primarios -que alertan de peligros a los conductores con el fin de evitar accidentes- y sensores terciarios -que alertan de los accidentes según se producen para minimizar el tiempo de respuesta, informando también de la ubicación exacta del incidente- de forma que se proporciona una mayor protección a todos los usuarios de la carretera.
2. Sobre el proyecto
2.1 Objetivos.
El objetivo general del proyecto Smart RRS es reducir el número de lesiones y muertes causadas por accidentes de tráfico a los usuarios de la carretera más vulnerables, tales como motociclistas y sus pasajeros, así como ciclistas, a través del desarrollo de una barrera de seguridad inteligente.
Esta barrera de seguridad inteligente deberá:
- Reducir el número de accidentes a través de una más detallada y precisa información sobre el estado real del tráfico rodado y de las condiciones climáticas.
- Proporcionar una sustancialmente mayor capacidad de protección ante impactos de usuarios vulnerables de la vía.
- Optimizar la asistencia a las personas accidentadas, proporcionando información exacta sobre dónde y cuando ocurren accidentes en tiempo real.
Este barrera de seguridad inteligente tendrá las siguientes características:
- Posibilidad de ser implementada junto a barreras de seguridad convencionales.
- Competitiva en coste de fabricación, instalación y operación.
- Mínimas demandas adicionales en la infraestructura (tales como infraestructuras para su alimentación y gestión de comunicaciones).
- No generará riesgos adicionales de ningún tipo.
- Robusta frente a inclemencias del medio ambiente.
- Robusta frente a fallos (por ejemplo, la pérdida de un nodo de detección debe permitir que el sistema -en su conjunto- sea operativo).
- Robusta frente a falsas alertas, evitando que, por ejemplo, los servicios de emergencia sean avisados innecesariamente.
- Cada tramo de barrera debe conocer su ubicación.
- Posibilidad de ser implementada junto con otras infraestructuras de carretera y de gestión del tráfico.
2.2 Progreso técnico.
El concepto fundamental de la barrera de seguridad inteligente es el de un conjunto de nodos inteligentes integrados en una barrera de seguridad, proporcionando así nuevas funcionalidades que pueden incluir:
- Sensores de impacto. Su misión es la de ubicar el punto exacto donde se produce un accidente y cuantificar su extensión e intensidad. También se utilizan como activadores de la alerta a los servicios de emergencias y de control de tráfico. De igual modo, pueden activar señales de peligro que alerten a los usuarios de la vía que se aproximen al lugar del accidente.
- Sensores de condiciones de la carretera. Proporcionan información sobre riesgos derivados de la climatología, tales como presencia de hielo, nieve, fuertes vientos, etc.
- Monitorización de tráfico. Se identifican las congestiones de tráfico y se alerta de ello a los vehículos que se aproximan a la zona.
- Monitorización de objetos detenidos. Permite la identificación de obstáculos fijos en la carretera.
- Comunicación con los servicios de mantenimiento. Suministra información sobre el estado operativo de la barrera metálica inteligente a los servicios encargados del mantenimiento de las infraestructuras de la vía.
- Comunicación con los usuarios de la carretera, vía sistemas de comunicación infraestructura-vehículo.
Para reducir las exigencias de infraestructura en términos de suministro de energía y soporte para comunicaciones, se contempla el uso de pequeños generadores (paneles fotovoltaicos, aerogeneradores,...) y comunicaciones inalámbricas.
Donde sea posible, el sistema debe hacer uso de sensores de bajo coste, así como de tecnologías ya desarrolladas y utilizadas por la industria del automóvil (por ejemplo, sensores de choque desarrollados para airbags o tecnología de radar para automoción).
Ventajas:
- Coste reducido en comparación con otros sistemas de sensorización de infraestructuras.
- Mejora de la información para todos los agentes implicados.
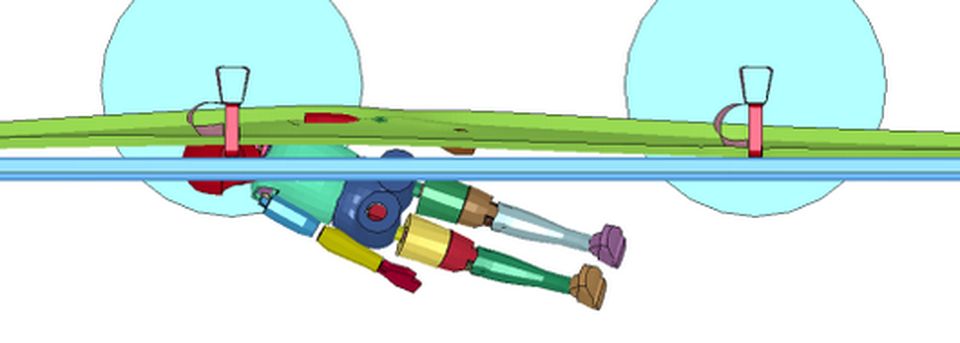
3. Resultados del ensayo.
- Head Injury Criterion
- Maximum allowable: HIC36 = 1 000,00
- Measured: HIC36 = 166,42
- Difference: 16,42 % of the limit value
- Forces in neck (X-direction)
- Maximum allowable: FX = 3 100,00 N
- Measured: FX = 736,72 N
- Difference: 23,77 %of the limit value
- Forces in neck (Z-direction, compression)
- Maximum allowable: FZ = - 4 000,00 N
- Measured: FZ = - 1 663,46 N
- Difference: 41,59 % of the limit value
- Forces in neck (Z-direction, tension)
- Maximum allowable: FZ = 3 300,00 N
- Measured: FZ = 1 097,53 N
- Difference: 33,26 % of the limit value
- Moments in neck (X-direction, CG correction)
- Maximum allowable: MX = ±134,00 Nm
- Measured: MX = 54,53 Nm
- Difference: 40,70 % of the limit value
- Moments in neck (Y-direction, CG flexion)
- Maximum allowable: MY = ±190,00 Nm
- Measured: MY = 46,31 Nm
- Difference: 24,38 % of the limit value
- Moments in neck (Y-direction, CG extension)
- Maximum allowable: MY = -57,00 Nm
- Measured: MY = -20,40 Nm
- Difference: 35,78 % of the limit value
4. Consorcio
5. Valoración de CDTI
«En cuanto a los proyectos presentados, quizás el más destacable sea el proyecto presentado a la convocatoria de transporte por superficie de la DG RTD titulado “SMART RRS - Innovative concepts for smart road restraint systems to provide greater safety for vulnerable road users” liderado por la Universidad de Zaragoza, el cual ha sido el mejor valorado de los 65 proyectos propuestos para financiación por la Comisión.»
Centro para el Desarrollo Tecnológico Indsustrial (CDTI). Informe sobre Programas Comunitarios. VII Programa Marco de I+D de la UE. Tema 7: Transporte (incluida Aeronáutica y Galileo). Resultado de las convocatorias de 2007. 14 de febrero de 2008. Página 12.
6. Vídeos